Meet Some of my Sumo Robots
Rhino – Sumo Robot
Tiger – Sumo Robot
Eagle – Sumo Robot
Sumo Robots
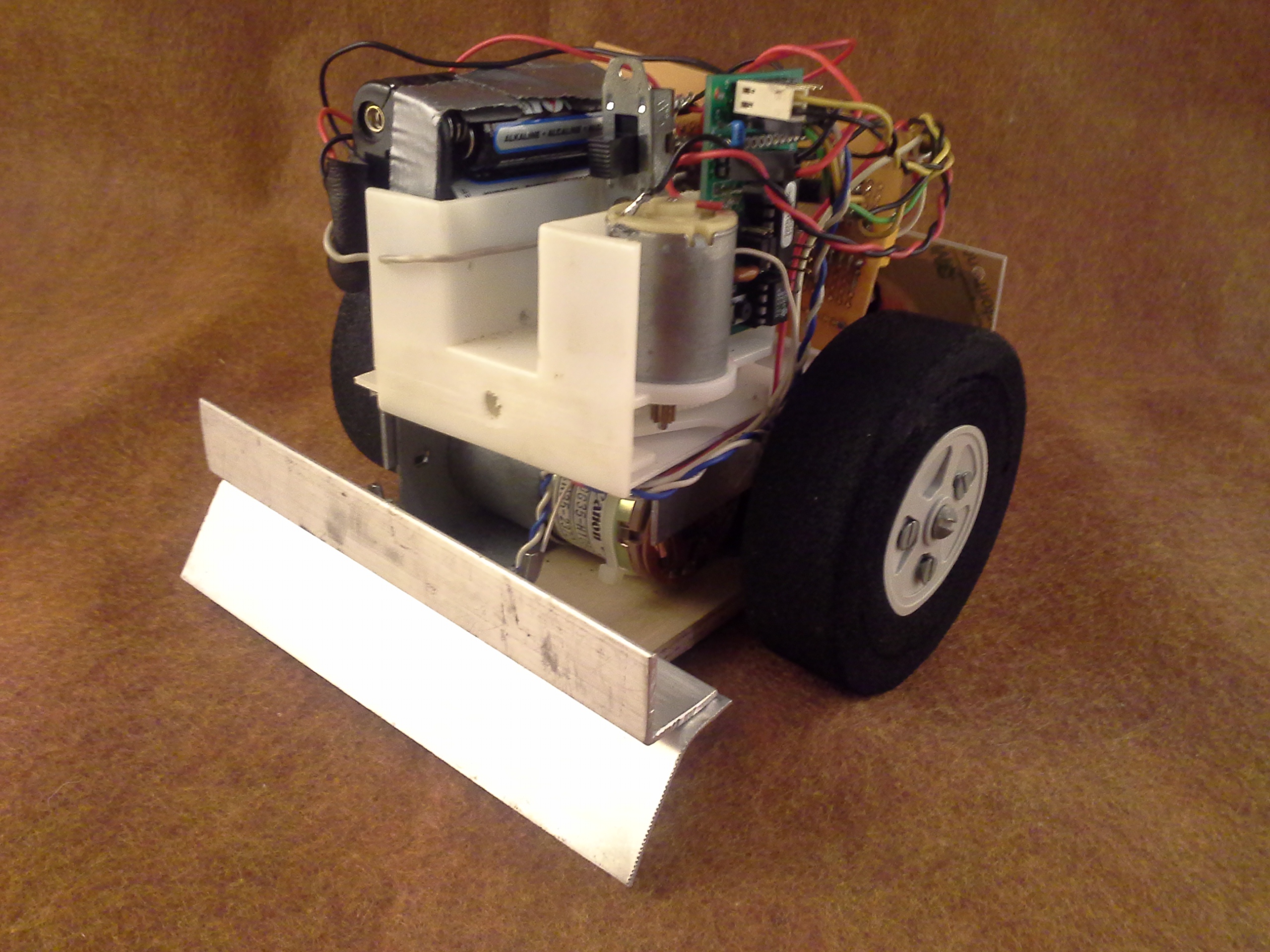
Joust – Sumo Robot
Sumo Robot Building Hints
Building an autonomous sumo robot can be easy. You need to assemble a few key parts:
Power train – You need good gear motors. I look for gear motors everywhere (Ax man surplus stores around the Twin Cities area are a great source). Lego gear motors are also pretty good.
Body – Most sumo bots are built wedge shaped. Build it tough, it will take a beating.
Power – Select a reliable power source. I use 6-9 volt packs of rechargeable batteries. I tend to use two separate power sources, one for motors and one for control.
Sensors – Detecting the edge of the ring is a must. I have used CDS cells, IR receiver and transmitter pairs and mechanical switches to detect the ring edge. Detecting the opposing robot is optional. You can use IR, acoustic or even mechanical bump switches.
Brains – The brains of a sumo bot can be quite simple. A basic control flow can be:
- Select a direction to go. This can be based on detecting the opponent, picking a random direction, or just turning a little bit at a time one direction.
- Go straight
- If you detect the edge of the ring back up and try again.
- Got to 1.
This control flow can be hardwired or programmed into simple microcontroller such as a basic stamp. Smarter controllers will let you do complex actions based on sensor inputs.
Rules:
Here are the rules we use for our sumo robot wrestling matches:
Sumo Rules Short Version: sumo rules short
Sumo Rules Long Version: sumo rules long
Some of my sumo robots include:
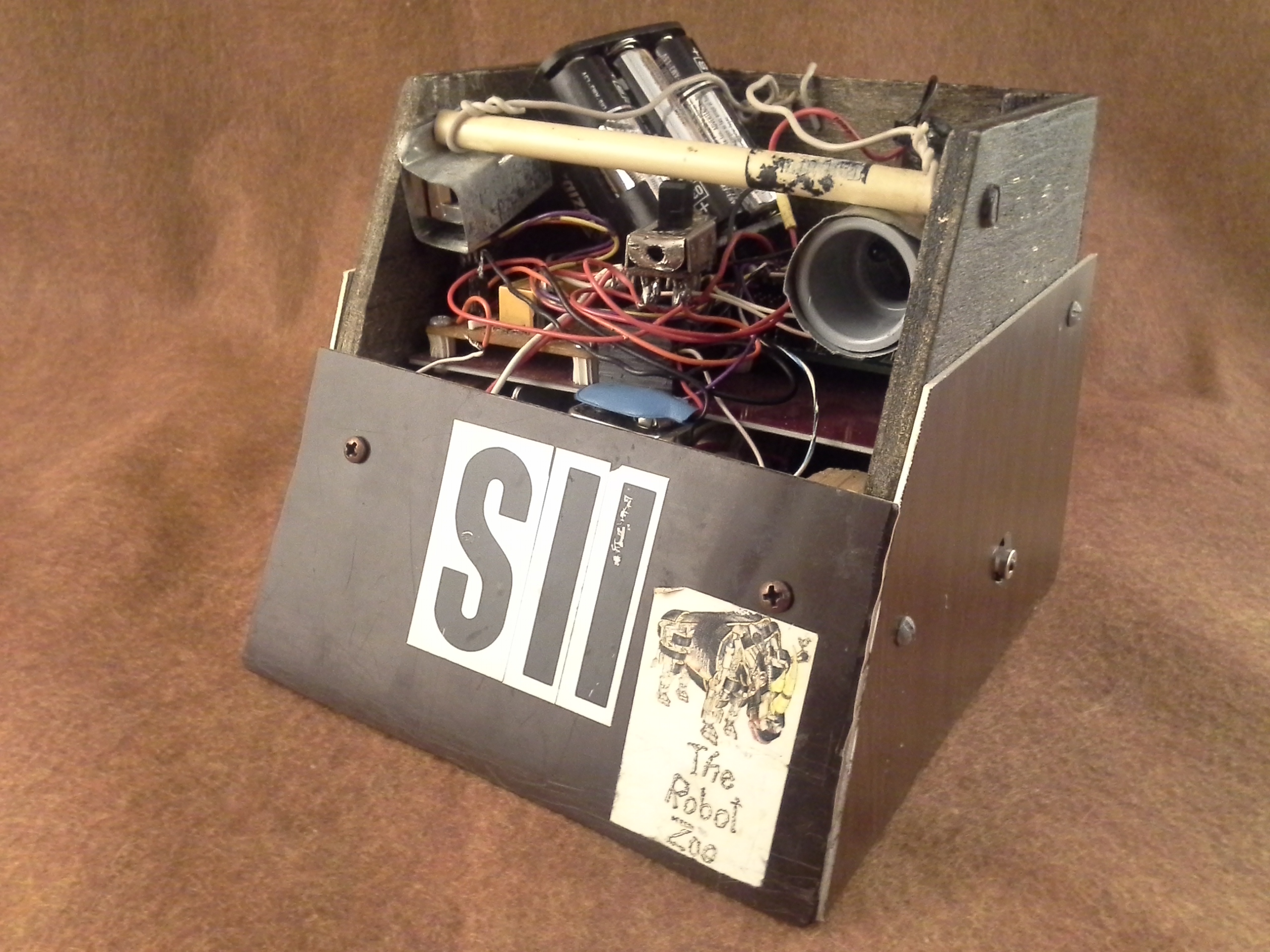
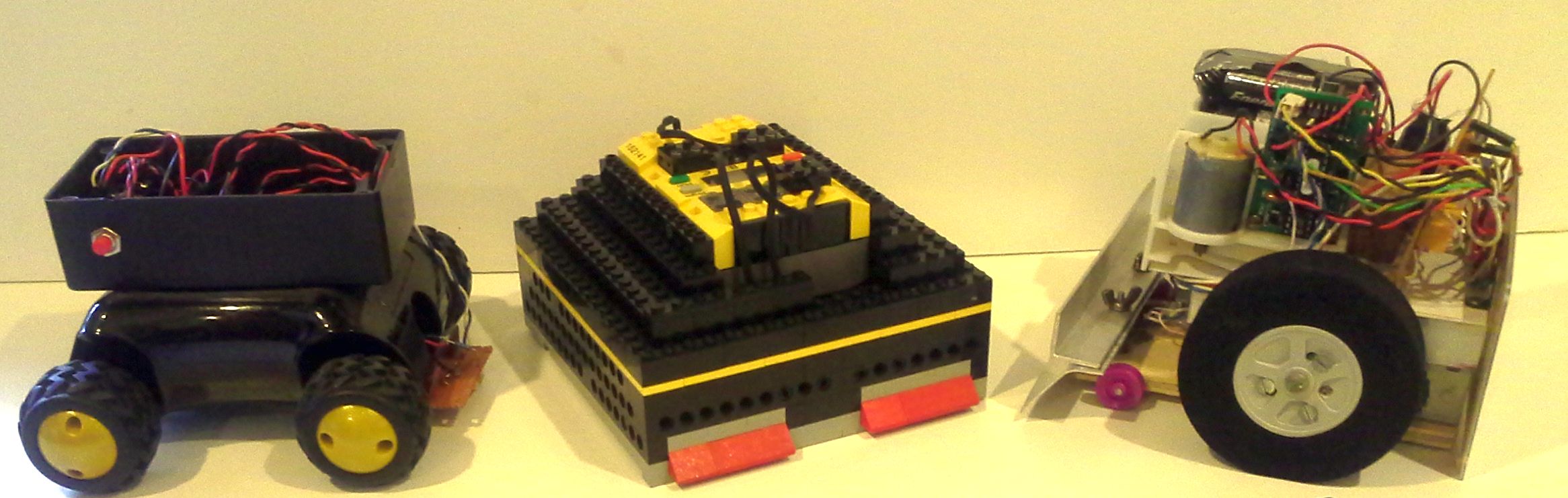
CAM: Was my first sumo bot and was built around a 555 timer. It runs forward till it detects the white ring edge, then trips a relay to reverse a motor for a short while and tries again. The front wheels turn when it goes backwards, causing it to go a new direction.
Joust: This is a basic stamp based robot with strong motors. It uses the control flow described above using a CDS cell to detect the white ring boundary.
Rhino: This is a stamp based robot that uses CDS cells to detect the white ring boundary and IR emitter / receiver pairs to look for the opponent. The program follows the flow described above in the brains section.
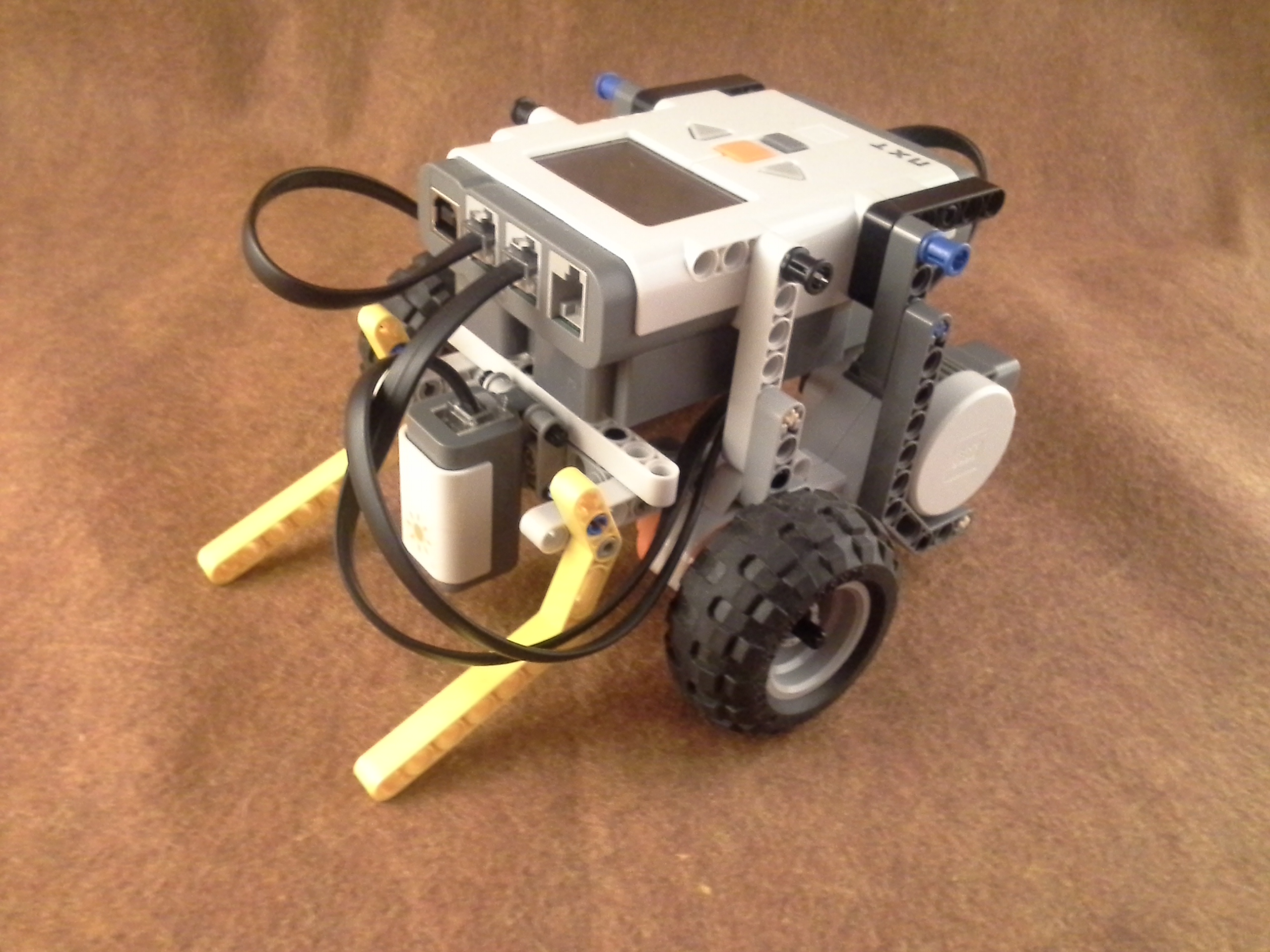
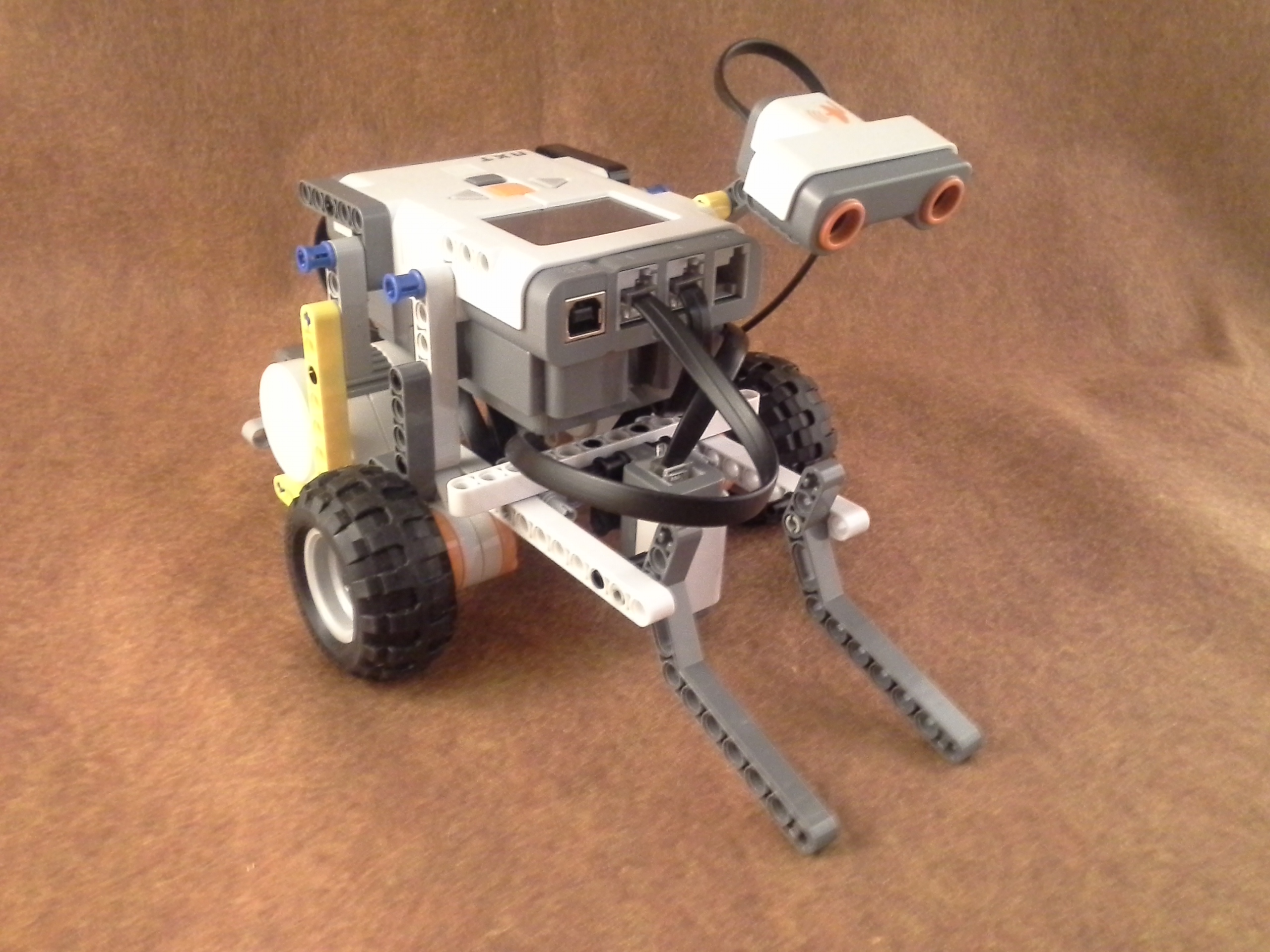
Brick: This robot is built with only Lego Mindstorm parts. The motors in the kit are great with excellent torque. The light sensor is great for detecting the white ring edge. Since it has no sensors for detecting the opponent, its program just selects a random direction, goes forward till it finds the ring edge, backs up a little, and repeats. It took me two evenings to build and much to my dismay, it regularly beats my other robots that I have put many more nights into building.
Here are some useful web links:
Another bot building example: http://www.ece.concordia.ca/~dave/project/intro.html
Other sumo rules: http://members.tripod.com/rksingh21/sumo.htm